






















印刷製造工程で、紙さばきは印刷物の安定した品質と効率的な生産のために重要な工程です。
Revoria Kamisa PH12は、印刷後の大判用紙の束をつかみ、風入れをし、持ち上げて紙揃え機に運ぶ、断裁前の一連の作業負荷軽減と省人化を実現。印刷オペレーションに新たな革新をもたらします。
- 身体的負荷の高い作業を自動化し、労働環境を改善したい
- 生産ラインを省人化し、最適な人員配置をしたい
- 稼働時間の制約をなくし、生産性を向上したい
- 属人的なスキル依存を解消、人的ミスを減らして品質価値を高めたい
リフターに載せた刷本をRevoria Kamisa PH12がつかみ風入れを行いジョガーへ運びます。
オペレーターは、紙揃えした刷本をそのまま断裁機へ。
Revoria Kamisa PH12は、周辺機器と連携して*1 ポストプレスの自動化に貢献し印刷現場のスマートファクトリー化を加速します。
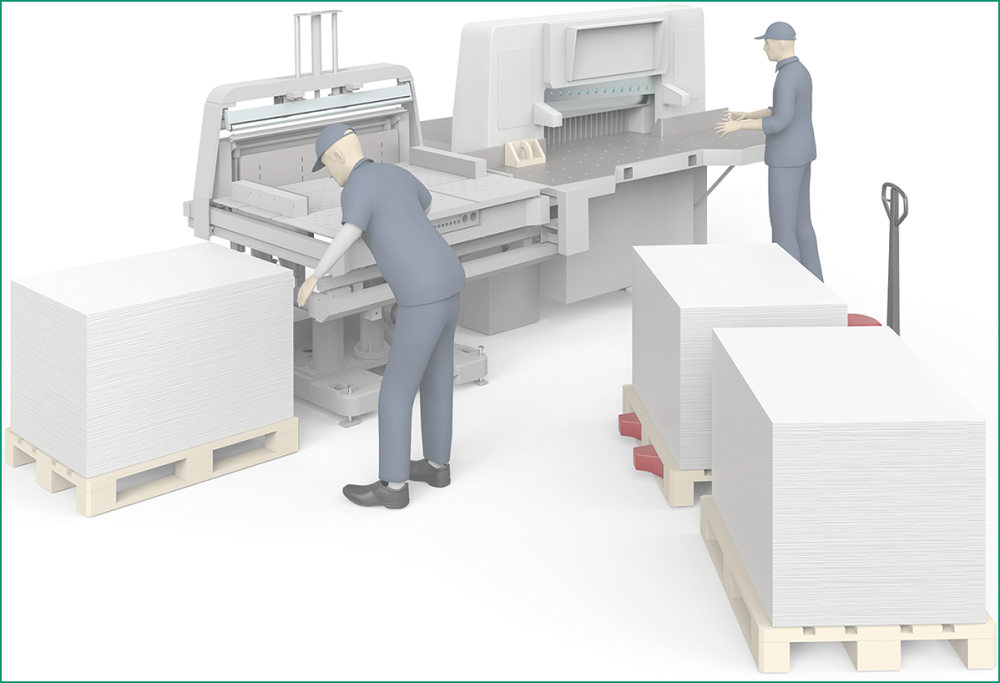
これまでの印刷製造工程
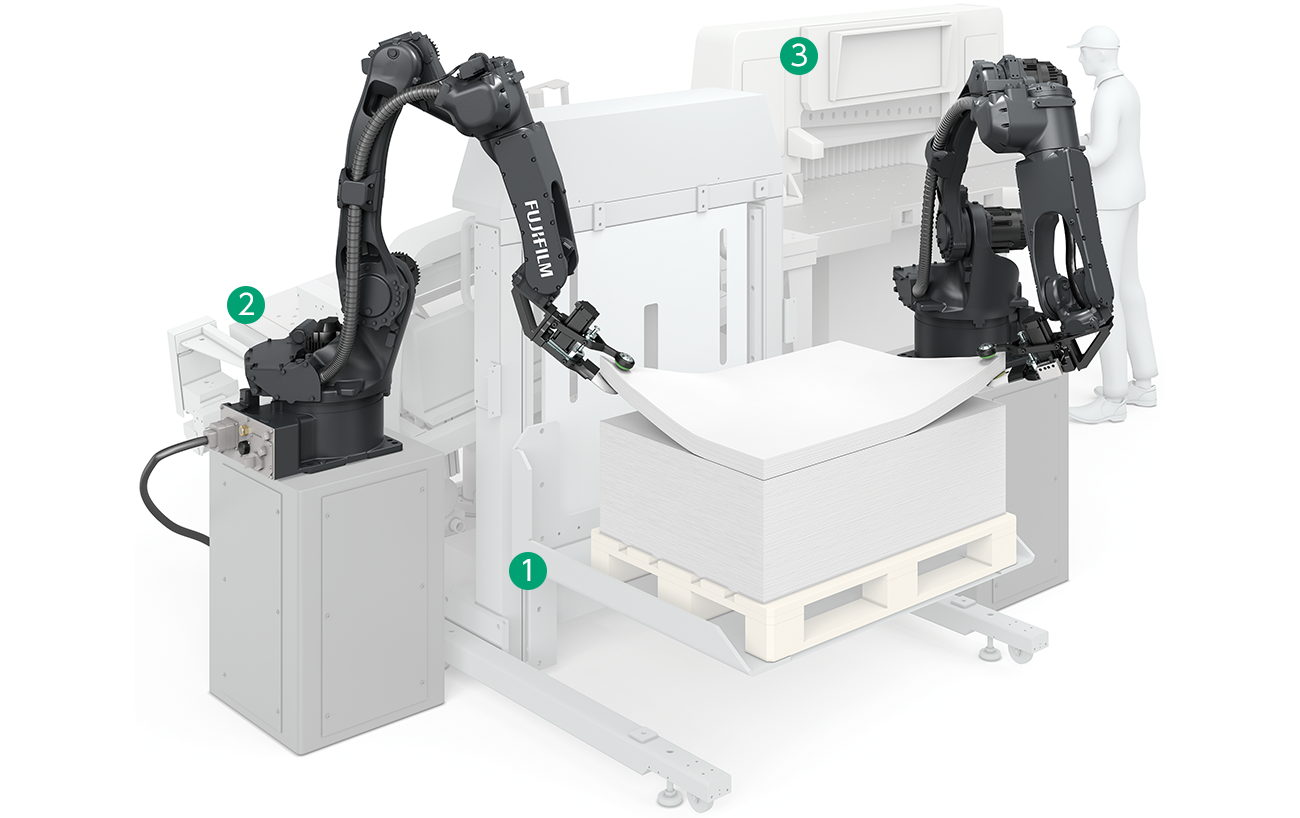
Revoria Kamisa PH12で自動化した工程
❶ リフター
重い用紙の束やパレットを持ち上げ移動させる装置。
❷ ジョガー(紙揃え機)
印刷後の用紙を揃える装置。
❸ 断裁機
用紙を指定サイズや形状に切り揃える装置。
- *1 別売りの周辺機器と組み合わせたシステムインテグレーションが別途必要です。
- *2 別売りの商品です。
ロボットコントローラが左右のアームとハンドの動作を制御。
双腕が協調動作することで、たわむ大判用紙もしっかりつかみ、しなやかに持ち上げて次工程に渡すことができます。
多くの製造業の生産ラインで活用されている6軸垂直多関節型のアームを採用。
プログラミングによってアームの微細な角度の曲げ伸ばし、回転、ひねりなど自在に動かすことができます。
左右のアームで重い大判用紙の束も常にパワフルにハンドリングし、生産性の向上に貢献します。
さらにRevoria Kamisa PH12を動かすロボットコントローラは、産業用ロボットの安全性に関する規格認証であるISO 10218(国際規格)およびJIS B 8433(日本工業規格)を取得。
セーフティースキャナなど各種安全センサー*3 と連動させることも可能です。
- *3 別売りの商品です。
停止位置・加減速・トルク(回転力)を高精度に制御できるサーボモーターにより、つかむ力をコントロールします。
印刷で使用される多様な紙種・用紙サイズ*4 に適した力でしっかりつかみ、熟練した人の手と同じように巧みな力加減で調整しながらハンドリングすることができます。
ハンドに搭載している3Dセンサーが、積まれた用紙表面の凹凸や波形を読み取ることにより、確実に用紙をつかみます。
印刷製造工程では静電気で用紙同士が貼り付いてしまうこともあります。
Revoria Kamisa PH12は、ハンドの先に搭載されたイオナイザーの8つのエアノズルからイオンを含んだ風を放出します。
用紙をひねりながら用紙間にイオンを含んだ風を送ることで、静電気を除去し*5 、次工程での断裁ズレを防ぎ品質安定化に貢献します。
- *4 B2~菊全サイズ(636×939 mm)。すべての用紙種類での性能を保証するものではありません。
- *5 静電気を完全に除去するものではありません。
動画でわかりやすくご紹介します。(Youtubeで動画を再生します)
FUJIFILM Innonative post press automated solution